Global Research Lab. |
Introduction
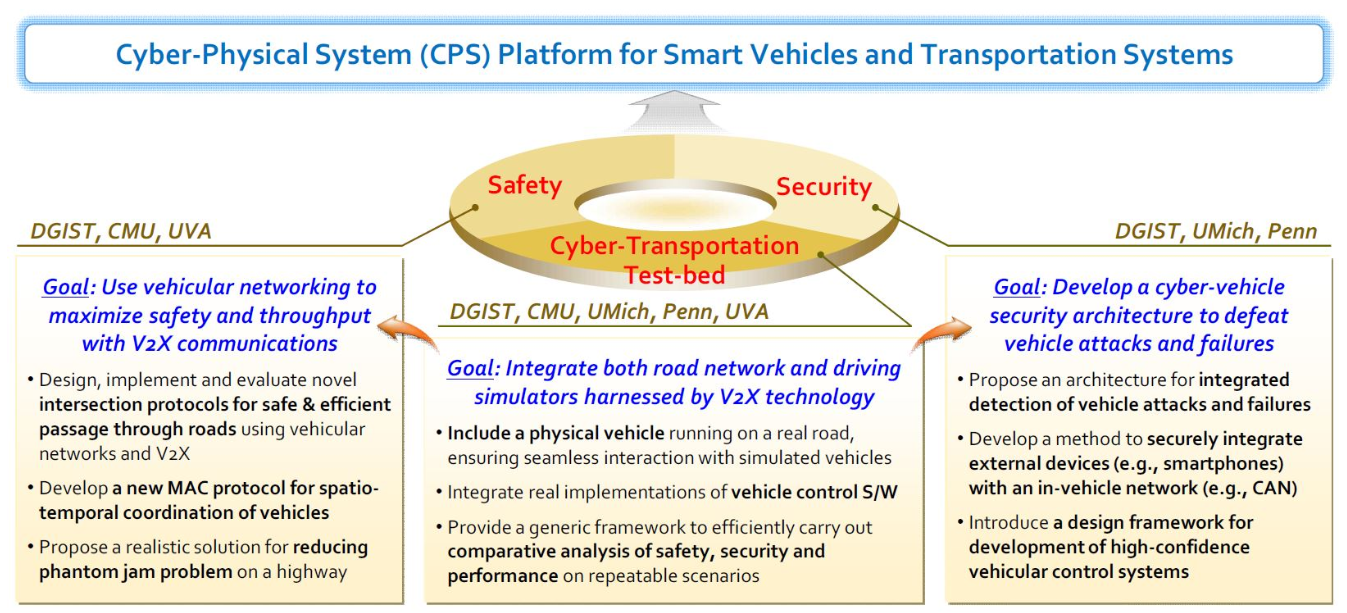
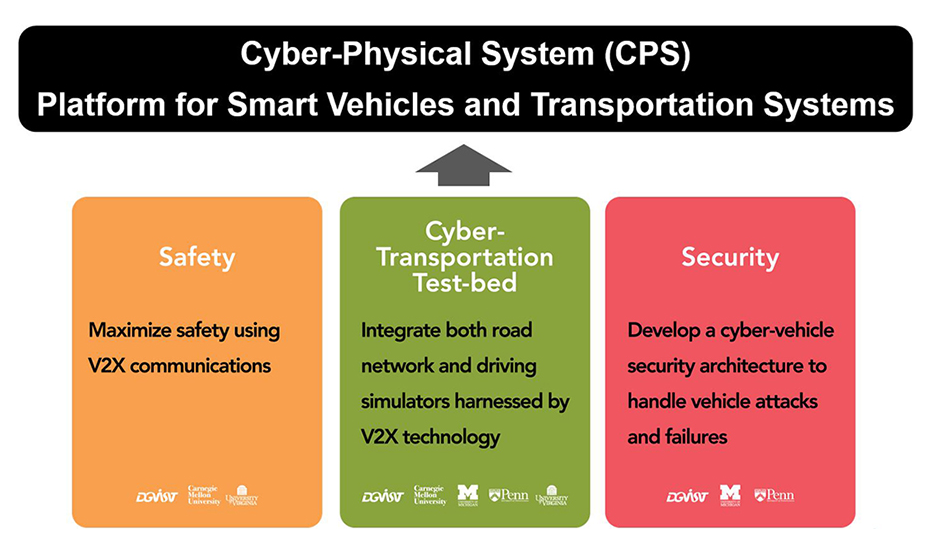
- The main goal of the proposed project is to develop a CPS platform for smart vehicles and transportation systems to assure ultimate level of safety and security. The GRL team brings already proven innovative products such as a well-validated human-in-the-loop simulation featuring driving simulator and an integrated architecture for V2X communications and traffic simulators. The GRL team will conduct collaborative research on safety and security, as well as development of smart transportation test-bed.
- The proposed research will significantly advance the state-of-the-art in the design of vehicles and transportation systems, and foster the deployment of smart, connected vehicles in safety-critical real road environments. Specifically, V2X-based vehicular networking technologies will maximize both safety and throughput via smart intersection protocols and vehicular MAC protocols, thus effectively removing traffic lights. The cyber-vehicle security solutions will also contribute to the safety assurance by safeguarding vehicles against malicious attacks as well as unintended failures. In addition, the proposed cyber-transportation test-bed will provide a safe and economical evaluation environment for connected highway and vehicles systems. Finally, through GRL, participating postdoctoral researchers and graduate students will be sent to FRLs enabling them to learn more specialized techniques from FPIs. Such experiences will be extremely beneficial to them in their future career as experts in vehicular and transportation CPS.
Korean/한국어
국제 협력연구를 통해 지능형 차량 및 교통시스템의 안전성 및 보안성을 동시에 획기적으로 개선할 수 있는 CPS 기반의 신개념 융합 플랫폼 개발
기대효과
- 교통 시뮬레이터, 운전 시뮬레이터 및 Vehicle-to-Vehicle 및 Vehicle-to-Infrastructure (일반적으로 V2X) 통신을 완벽히 통합한 혁신적인(실제 차량과 시뮬레이션 차량 간 상호 연동, 실제 차량 제어 S/W 통합, 성능평가 및 분석을 위한 프레임워크 제공 등) Cyber-Transportation 테스트베드 개발
- V2X 통신 기반의 무선 차량 네트워크를 활용하여 안전성(교통사고, 사망 및 부상 최소화) 및 효율성(교차로 무정차 통과를 통한 신호등 없는 교통시스템 실현)을 극대화하기 위한 핵심기술 개발
- 차량에 대한 악의적 공격 및 고장상황을 실시간으로 검출하고 대응할 수 있는 Cyber-Vehicle 융합보안 핵심기술(차량과 모바일 기기 간 Secure Integration 등) 및 설계 프레임워크 개발
기대효과
- 지능형 차량 및 교통시스템 실용화를 위한 기술적 난제를 해결함으로써 V2X 통신을 통한 충돌 회피∙방지 등으로 고안전 사회 실현을 앞당길 것이며, 차량 내 스마트폰∙태블릿 접속, 위치 추적, 차량 점검, ECU 업데이트 등의 각종 도로 편의 서비스를 안전하게 제공할 수 있을 것임
- 안전성, 보안성 및 편의성 극대화를 통해 지능형 자동차 산업을 활성화하며 각종 지능형 융합서비스 신산업을 개척할 수 있음
- 교통사고로 인한 사망∙부상 및 교통정체 최소화, 신호등 없는 교차로 실용화를 통해 안전하고 효율적인 미래 교통시스템 실현을 앞당길 수 있음
- KRL과 FRL 간 상호 인적 교류 및 국제 협력연구를 통해 세계 최고 수준의 연구실을 구축하며 참여연구원들의 연구수월성을 높일 것임
Collaboration
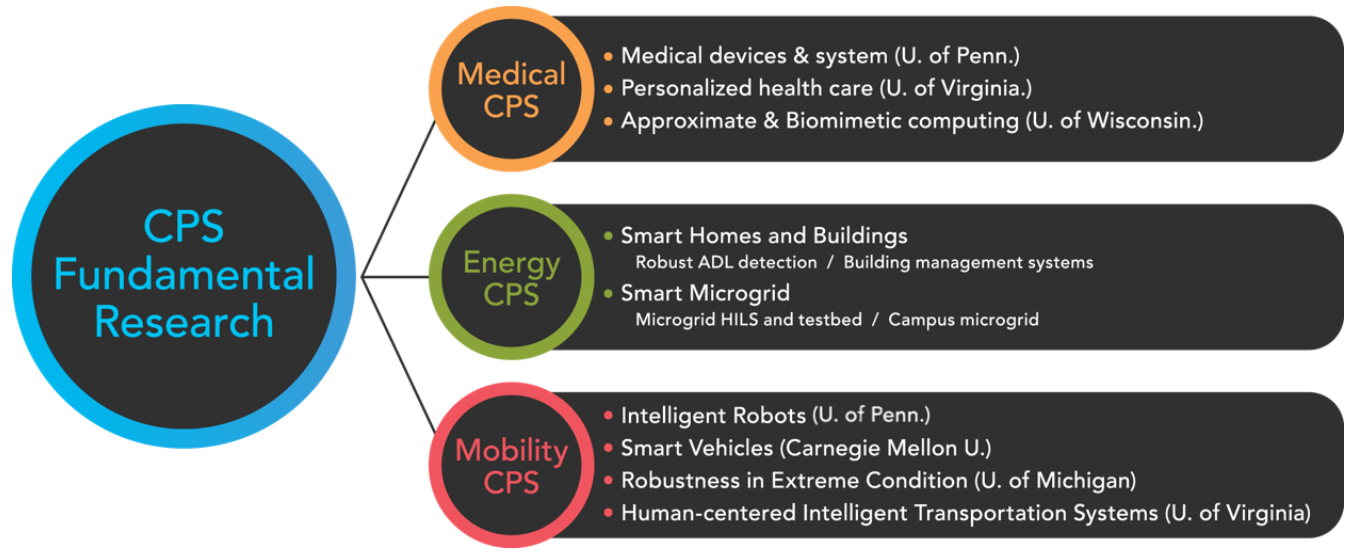
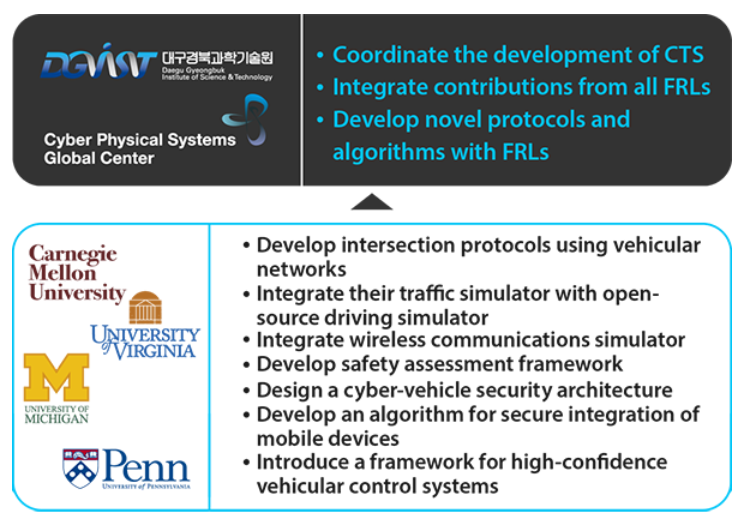
The proposed GRL project brings together a team of world-renowned researchers in the field of CPS. Team members have an extensive track record of working together on several large projects and producing joint results. KPI, a world-class researcher in CPS, produced a number of contributions that have made a significant impact in the areas of real-time systems/databases, flexible security, monitoring and control, and networked embedded systems, and has recently been conducting excellent research on vehicular and transportation applications of CPS, including fundamental research on safety and security issues as well as the development of an integrated transportation simulator, in close collaboration with FPIs. FPIs are world-leading researchers in areas of CPS, smart vehicles, and intelligent transportation systems. They possess outstanding and diverse expertise in vehicular networks (V2X), protocol design and evaluation, safe and efficient intersection protocols, large-scale simulation of vehicular networks, integrated operations of real and simulated vehicles in hybrid physical and virtual environments, and operating systems support. Through the proposed GRL program, KPI and FPIs will further extend and deepen collaborations on developing a novel CPS platform, on top of a cyber-transportation test-bed, to assure ultimate safety for smart vehicles and transportation systems by simultaneously addressing safety and security challenges. The new cyber transportation test-bed that integrates the capabilities of traffic and driving simulators, V2X communications, and secure in-vehicle networking, will provide a very important evaluation tool for the proposed research. We are confident that 6 years of successful collaborations will make our GRL one of the world-best laboratories in the CPS area, especially in vehicular and transportation applications of CPS.
Members
|
PROFESSORS
|
STAFFS / RESEARCHERS
|
GRADUATE STUDENTS
|
Approaches
Theme 1. Integrated Cyber-Transportation Test-bed
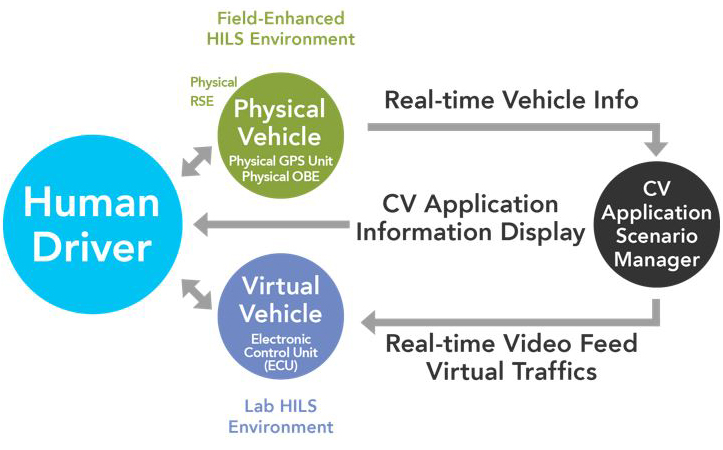
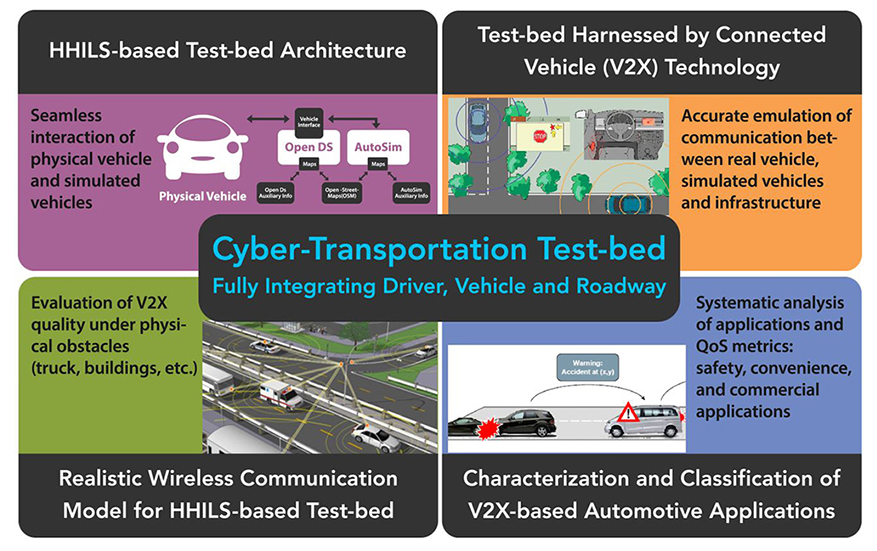
We will develop a HILS-based test-bed that integrates both a road network simulator and a realistic driving simulator by adding innovative ideas:
We will develop a HILS-based test-bed that integrates both a road network simulator and a realistic driving simulator by adding innovative ideas:
- integrationwithphysicalvehicles
- integration with real implementations of vehicle control software
- provisionofagenericframework
- integration with Connected Vehicle technology
Theme 2. Vehicular Networking to Maximize Safety and Efficiency
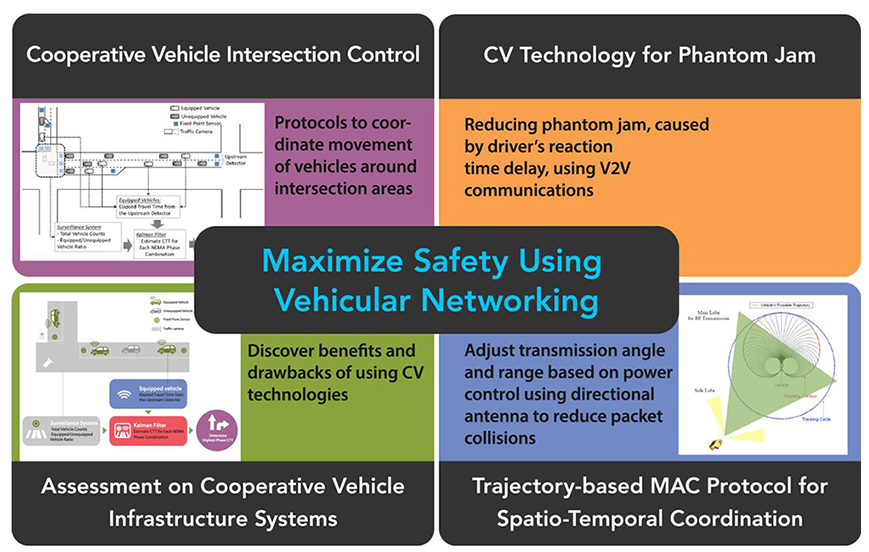
We will design, implement and evaluate transportation services and applications leveraging Connected Vehicle technology:
We will design, implement and evaluate transportation services and applications leveraging Connected Vehicle technology:
- development of novel intersection algorithm for efficient passage through intersections and roads
- development of specialized intersection protocol for a high traffic density scenario
- trajectory-based media access control for spatio-temporal coordination
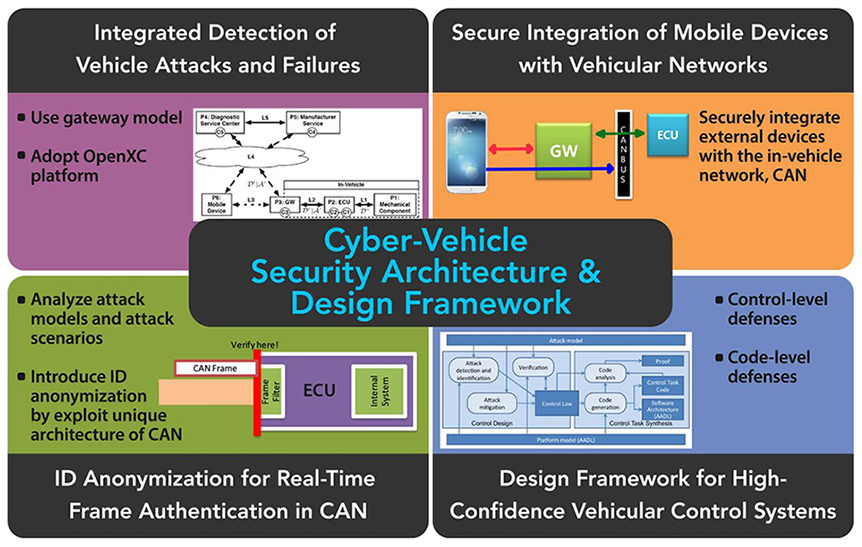
Theme 3. Cyber-Vehicle Security
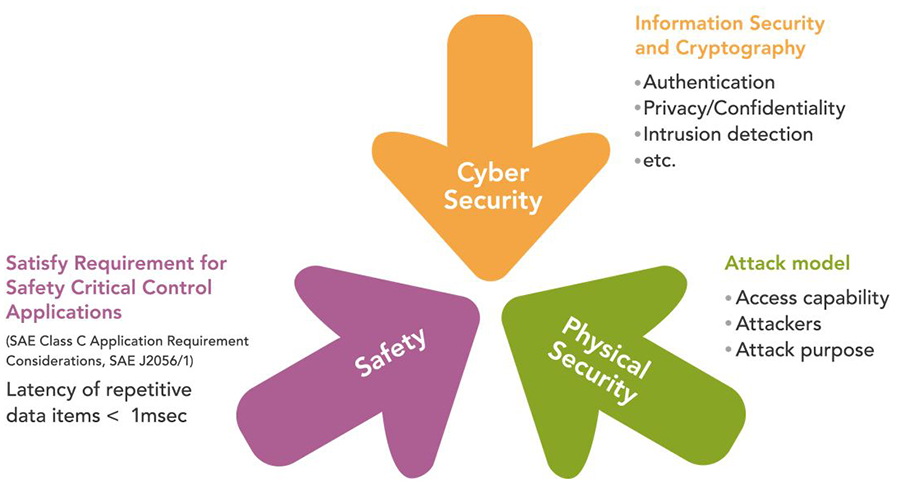
We will propose a cyber-vehicle security architecture for integrated detection of vehicle attacks and failures (IDAF).We will introduce a design framework for development of high-confidence vehicular control systems that can be used in adversarial environments. The proposed framework employs system design techniques that guarantee that the vehicle will maintain control, possibly at a reduced efficiency, under several classes of attacks.
We will propose a cyber-vehicle security architecture for integrated detection of vehicle attacks and failures (IDAF).We will introduce a design framework for development of high-confidence vehicular control systems that can be used in adversarial environments. The proposed framework employs system design techniques that guarantee that the vehicle will maintain control, possibly at a reduced efficiency, under several classes of attacks.
Korean/한국어
- 도로망∙교통시뮬레이터, 운전 시뮬레이터 및 Vehicle-to-Vehicle 및 Vehicle-to-Infrastructure (일반적으로 V2X) 통신을 완벽히 통합한 혁신적인(실제 차량과 시뮬레이션 차량 간 상호 연동, 실제 차량 제어 S/W 통합, 성능평가 및 분석을 위한 프레임워크 제공 등) Cyber-Transportation 테스트베드 개발
- V2X 통신 기반의 무선 차량 네트워크를 활용하여 안전성(교통사고, 사망 및 부상 최소화) 및 효율성(교차로 무정차 통과를 통한 신호등 없는 교통시스템 실현)을 극대화하기 위한 핵심기술 개발
- 교차로 무정차 통과를 위한 지능형 교차로 프로토콜 개발로 신호등 없는 교통시스템 실현
- V2X 차량들 간 시공간적 상호협력을 지원하는 새로운 Media Access Control (MAC) 프로토콜 개발
- Phantom Jam 문제에 대한 CPS적 해결방법 제안
- 차량에 대한 악의적 공격 및 고장상황을 실시간으로 검출하고 대응할 수 있는 Cyber-Vehicle 융합보안 핵심기술(차량과 모바일 기기 간 Secure Integration 등) 및 설계 프레임워크 개발
- 차량 내부 네트워크와 모바일 기기 간 Secure Integration 방법 개발
- 고신뢰 차량 제어시스템 개발을 위한 설계프레임워크 제안
